- Symplectic Discrete-Time Control of Flexible-Joint Robots: Experiments with Two Links. IFAC-PapersOnLine, Elsevier, 2021IFAC Workshop on Lagrangian and Hamiltonian Methods for Nonlinear Control (LHMNC)[7´th, 2021, Berlin], pp 230-242 mehr…
- High Order Discrete-Time Control Based on Gauss-Legendre Collocation. IFAC-PapersOn Line, Elsevier, 2021IFAC Workshop on Lagrangian and Hamiiltonian Methods for Nonlinear Control [7´th, Berlin, 2021], pp. 237-242 mehr…
- Symplectic discrete-time energy-based control for nonlinear mechanical systems. Automatica (Vol. 133, Article number 109842), 2021 mehr…
- Discrete-time port-Hamiltonian systems: A definition based on symplectic integration. Systems and Control Letters (Vol. 133), 2019, Article number 104530 mehr…
- Numerical Methods for Distributed Parameter Port-Hamiltonian Systems – Structure-Preserving Approaches for Simulation and Control. TUM.University Press , 2019 mehr…
- Discrete-time flatness-based feedforward control for the 1D shallow water equations. Joint 8th IFAC Symposium on Mechatronic Systems and 11th IFAC Symposium on Nonlinear Control Systems, Elsevier Ltd., 2019IFAC-PapersOnLine, pp. 42-47 mehr…
- Zur Erhaltung von Struktur und Flachheit bei der torbasierten Ortsdiskretisierung. at - Automatisierungstechnik 66 (7), 2018, 521--535 mehr…
- Weak Form of Stokes-Dirac Structures and Geometric Discretization of Port-Hamiltonian Systems. Journal of Computational Physics (361), 2018, 442-476 mehr…
- Discrete port-Hamiltonian formulation and numerical approximation for systems of two conservation laws. at - Automatisierungstechnik 65 (5), 2017, 308-322 mehr…
Numerical Methods for Control
In this research area we work on the beneficial use of (modern) numerical methods of time integration and spatial discretization for the power consistent simulation of multi-physics systems and the discrete-time control of sampled systems.
Control under slow sampling
Feedback controls that are designed based on continuous-time models, can be implemented in sampled control loops with high sampling frequency without relevant loss of accuracy and stability margin (emulation or quasi-continuous controller). For lower sampling frequencies (higher sampling times) the increasing mismatch between the underlying model and the neglected sample and hold mechanism leads to deterioration of the closed-loop behavior up to destabilization. A remedy is the use of higher order integration schemes in combination with appropriate input signal shaping to represent the system model and the target closed-loop dynamics. Using the implicit midpoint is the simplest way to re-use continuous-time control laws with a minimally invasive modification of the control structure - a block that generates the half step prediction of the closed-loop dynamics (Kotyczka, Thoma, 2021). The approach can be easily extended to the higher order, multi-stage setting with Gauss-Legendre collocation (Kotyczka, Martens, Lefèvre, 2021). The videos below show the improvement in the application to the trajectory control of a two-link flexible-joint robot at DLR, Oberpfaffenhofen. The emulation controller with high controlled stiffness produces unsatisfactory behavior at a sampling time of 8 ms (left video). The improvement when using the control implementation based on the implicit midpoint rule (right video) is remarkable. See (Thoma, Wu, Dietrich, Kotyczka, 2021) for details.
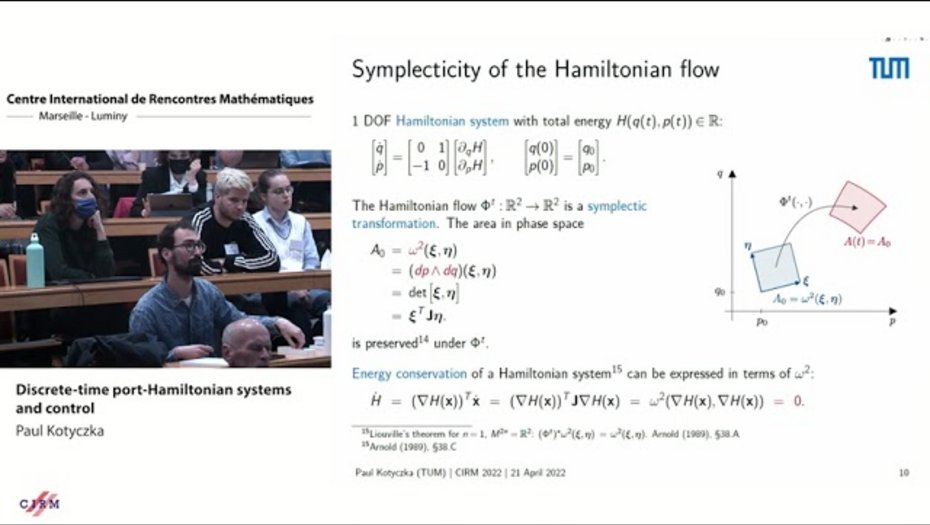
Discrete-time port-Hamiltonian systems and control
A lecture given at CIRM in April 2022 on the definition of discrete-time port-Hamiltonian systems using symplectic integration (Kotyczka and Lefèvre, 2019) and its use for control is available here:
Paul Kotyczka: Discrete-time port-Hamiltonian systems and control
Durch Klicken erklären Sie sich mit der Datenschutzerklärung von Google und unserer Datenschutzerklärung einverstanden.
Mehr Informationen
Mehr Informationen
Spatial and temporal discretization
The habilitation thesis (Kotyczka, 2019) summarizes approaches to retain the port-Hamiltonian structure under spatial (FE type and based on a direct discrete modeling approach on dual complexes) and temporal discretization. It shows also that certain combinations of methods preserve the flatness property that allows the direct computation of input and state trajectories for prescribed boundary outputs.